
Impact Factor:11.04
DOI number:10.1109/TIP.2021.3138644
Journal:IEEE Transactions on Image Processing
Key Words:Articulated Object, Category-level 6D Pose Estimation
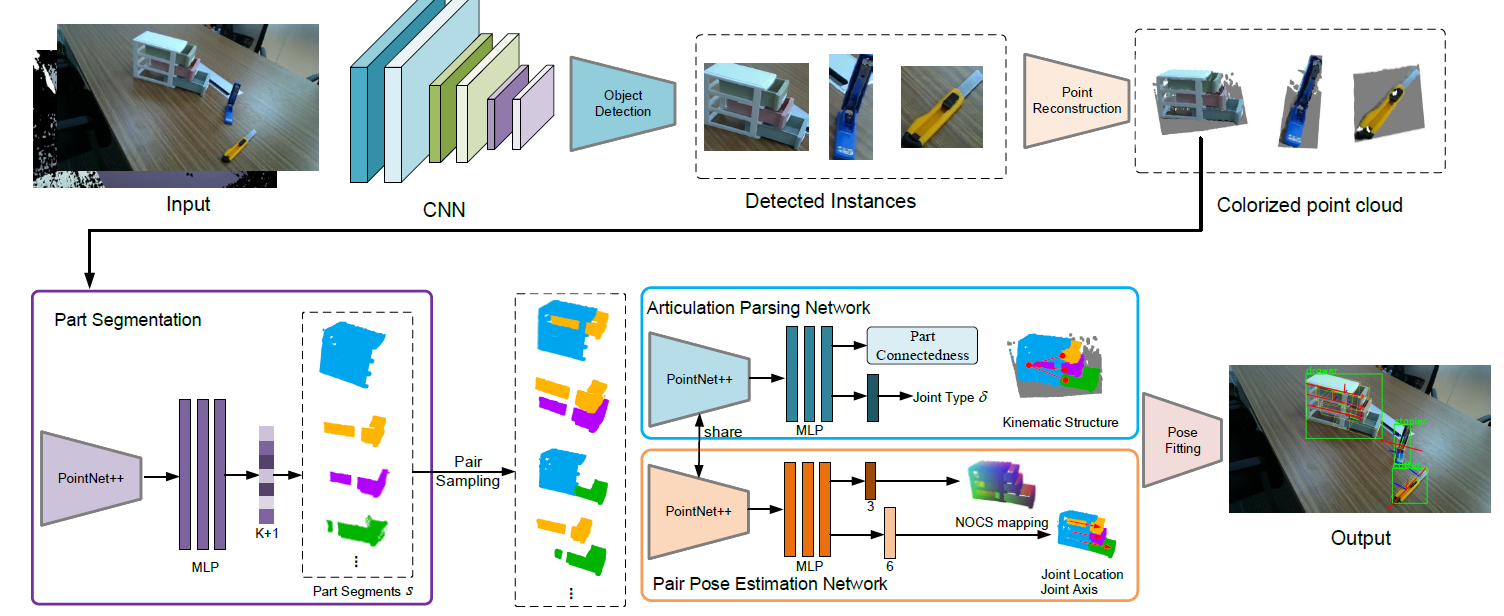
Abstract:Human life is populated with articulated objects. Current Category-level Articulation Pose Estimation (CAPE) methods are studied under the single-instance setting with a fixed kinematic structure for each category. Considering these limitations, we aim to study the problem of estimating part-level 6D pose for multiple articulated objects with unknown kinematic structures in a single RGB-D image, and reform this problem setting for real-world environments and suggest a CAPE-Real (CAPER) task setting. This setting allows varied kinematic structures within a semantic category, and multiple instances to co-exist in an observation of real world. To support this task, we build an articulated model repository ReArt-48 and present an efficient dataset generation pipeline, which contains Fast Articulated Object Modeling (FAOM) and Semi-Authentic MixEd Reality Technique (SAMERT). Accompanying the pipeline, we build a large-scale mixed reality dataset ReArtMix and a real world dataset ReArtVal. Accompanying the CAPER problem and the dataset, we propose an effective framework that exploits RGB-D input to estimate part-level pose for multiple instances in a single forward pass. In our method, we introduce object detection from RGB-D input to handle the multi-instance problem and segment each instance into several parts. To address the unknown kinematic structure issue, we propose an Articulation Parsing Network to analyze the structure of detected instance, and also build a Pair Articulation Pose Estimation module to estimate per-part 6D pose as well as joint property from connected part pairs. Extensive experiments demonstrate that the proposed method can achieve good performance on CAPER, CAPE and instance-level Robot Arm pose estimation problems. We believe it could serve as a strong baseline for future research on the CAPER task. The datasets and codes in our work will be made publicly available.
Co-author:Haoyuan Fu,Han Xue,Wenqiang Xu
First Author:Liu Liu
Indexed by:Journal paper
Correspondence Author:Cewu Lu
Volume:31
Page Number:1072 - 1083
Translation or Not:no
Date of Publication:2022-01-05
Included Journals:SCI
Associate professor
Supervisor of Master's Candidates
Date of Birth:1993-09-21
E-Mail:
Date of Employment:2022-09-08
School/Department:计算机科学与技术系
Education Level:Postgraduate (Postdoctoral)
Gender:Male
Degree:Doctoral degree
Status:Employed
Alma Mater:中国科学技术大学
Honors and Titles:
2022年工业信息学顶刊TII年度最佳论文 2022-10-19
2019年国际工业信息学会议最佳论文奖 2019-07-18
2020年上海市“超级博士后” 2020-12-01
The Last Update Time : ..

