Copper coils wound finger-like pneumatic actuator with enhanced mechanical output and inductance self-sensing ability
Release time:2024-12-11
Hits:
Impact Factor:4.1
DOI number:10.1016/j.sna.2023.114689
Journal:Sensors and Actuators: A. Physical
Key Words:Actuator
Pneumatic
Output performance
Inductance
Sensing
Gripper
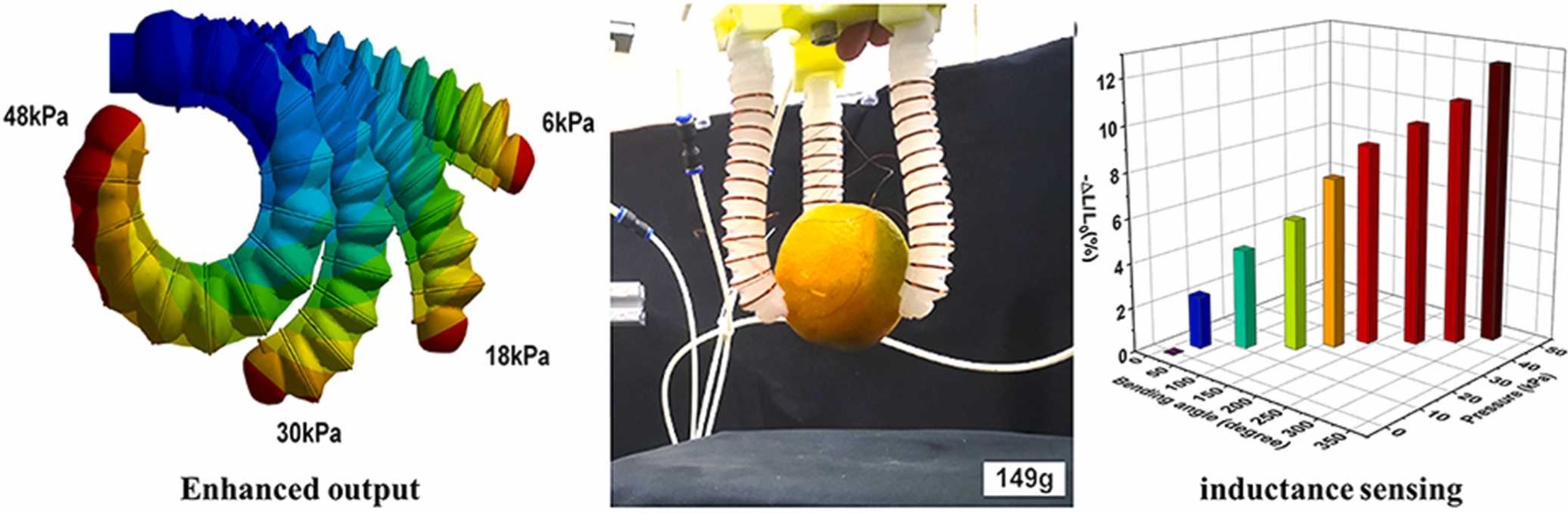
Abstract:Improving the output performance of soft actuators has always been the goal of researchers. Self-sensing actuators with enhanced output performances are even more interesting. However, it is a challenge to improve the output performance of actuators, while integrating sensing ability. Here, a novel design of pneumatic actuators is presented. The copper coils are carefully wound around the finger-like pneumatic actuators, which not only enhance output performances, but also provide inductance sensing ability. The finite element simulation and experimental results show that the bending angle and output force of the actuators are simultaneously improved. Moreover, the electromagnetic mutual inductance changes effectively when the pneumatic actuators stretch and bend under air pressure. High sensitivity, repeatability, and low hysteresis are found for this self-sensible actuator. By assembling the actuators, a three-finger griper was manufactured. The gripper not only could grasp and lift objects, but also could give inductance signals, which contained the information of the objects, such as size, shape and weight. This work provides a new route for the development of pneumatic soft actuators and soft robots, which have efficient driving and sensing abilities.
Indexed by:Journal paper
Discipline:Engineering
Document Type:J
Volume:363
Page Number:114689
Translation or Not:no
Date of Publication:2023-10-06
Included Journals:SCI
Links to published journals:https://www.sciencedirect.com/science/article/pii/S0924424723005381
